
使用PyTorch进行深度学习实践
使用PyTorch进行深度学习实践
- Pytorch的API
- 数据加载和预处理
- 定义网络模型
- 定义损失函数和优化器
- 训练网络
- 测试网络
- 保存和加载模型
- GPU加速
- 使用TensorBoard进行可视化
0. Pytorch的API
- data模块:提供了数据处理工具
- nn模型:定义了大量的神经网络层和常见损失函数
1. 数据加载和预处理
PyTorch提供了torch.utils.data.DataLoader类,可以帮助我们方便地进行数据的加载和处理。
1.1. DataLoarder
DataLoader类提供了对数据集的并行加载,可以有效地加载大量数据,并提供了多种数据采样方式。
常用的参数有:
- dataset:加载的数据集(Dataset对象)
- batch_size:batch大小
- shuffle:是否每个epoch时都打乱数据
- num_workers:使用多进程加载的进程数,0表示不使用多进程
1.2. 自定义数据集
自定义数据集需要继承Dataset类,并实现__len__和__getitem__两个方法。
以下是一个自定义数据集的简单示例:
from torch.utils.data import Dataset, DataLoader
# 定义MyDataset类,继承父类Dataset
class MyDataset(Dataset):
def __init__(self, x_tensor, y_tensor):
self.x = x_tensor
self.y = y_tensor
def __getitem__(self, index):
return (self.x[index], self.y[index])
def __len__(self):
return len(self.x)
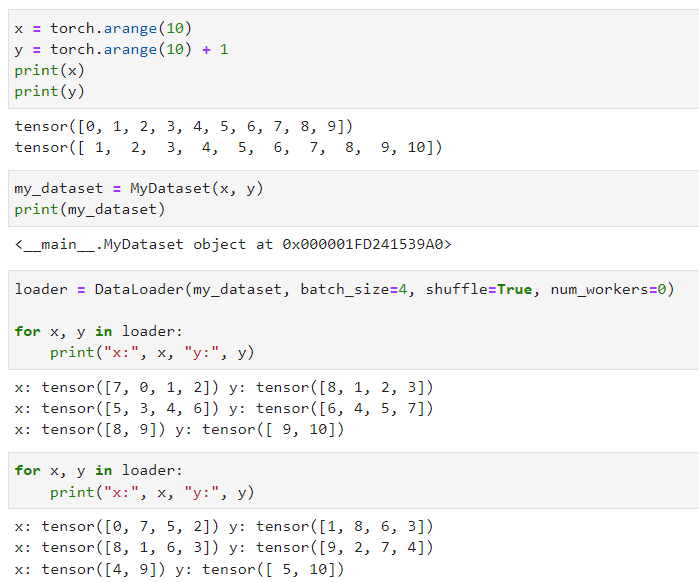
我们创建了一个简单的数据集,包含10个数据。然后我们使用DataLoader加载数据,并设置了batch大小和shuffle参数。
x = torch.arange(10)
y = torch.arange(10) + 1
my_dataset = MyDataset(x, y)
loader = DataLoader(my_dataset, batch_size=4, shuffle=True, num_workers=0)
for x, y in loader:
print("x:", x, "y:", y)
1.3. 使用pandas预处理原始数据
目标:使用pandas预处理原始数据,并将原始数据转换为张量格式
- pandas软件包是Python中常用的数据分析工具,pandas可以与张量兼容。
- 用pandas处理缺失的数据时,我们可根据情况选择用插值法和删除法。
1.3.1. 读取数据集
import os
os.makedirs(os.path.join('..', 'data'), exist_ok=True) # os.path.join会用对应操作系统的分隔符如/去拼接路径
data_file = os.path.join('..', 'data', 'house_tiny.csv')
with open(data_file, 'w') as f:
f.write('NumRooms,Alley,Price\n') # 列名
f.write('NA,Pave,127500\n') # 每行表示一个数据样本
f.write('2,NA,106000\n')
f.write('4,NA,178100\n')
f.write('NA,NA,140000\n')
# 如果没有安装pandas,只需取消对以下行的注释来安装pandas
# !pip install pandas
import pandas as pd
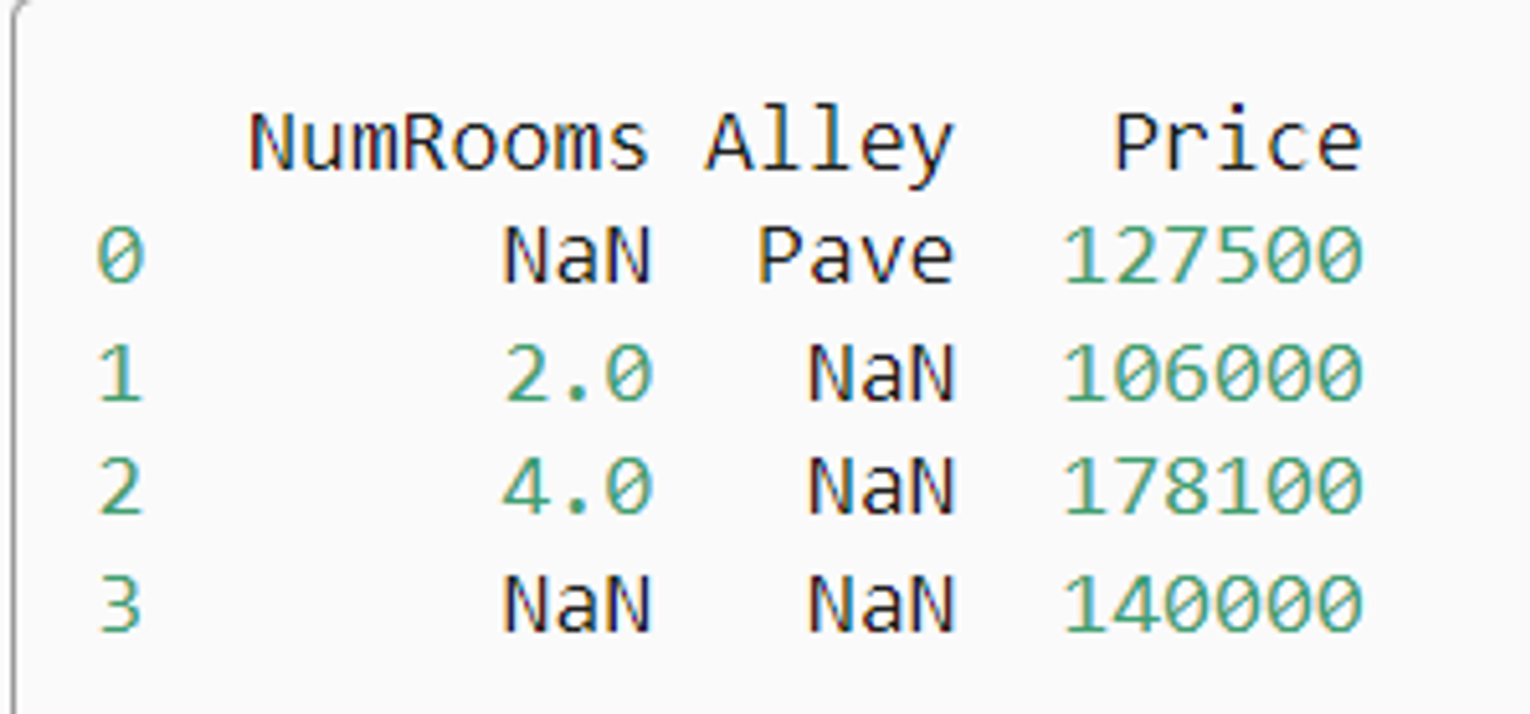
data = pd.read_csv(data_file)
print(data)
输出如下:
1.3.2. 处理缺失值(连续值和离散值)
注意,“NaN”项代表缺失值。
为了处理缺失的数据,典型的方法包括插值法和删除法, 其中插值法用一个替代值弥补缺失值,而删除法则直接忽略缺失值。
在这里,我们将考虑插值法。
# iloc, 全称为index location,即对数据进行位置索引,从而在数据表中提取出相应的数据。
# 将data分成inputs和outputs
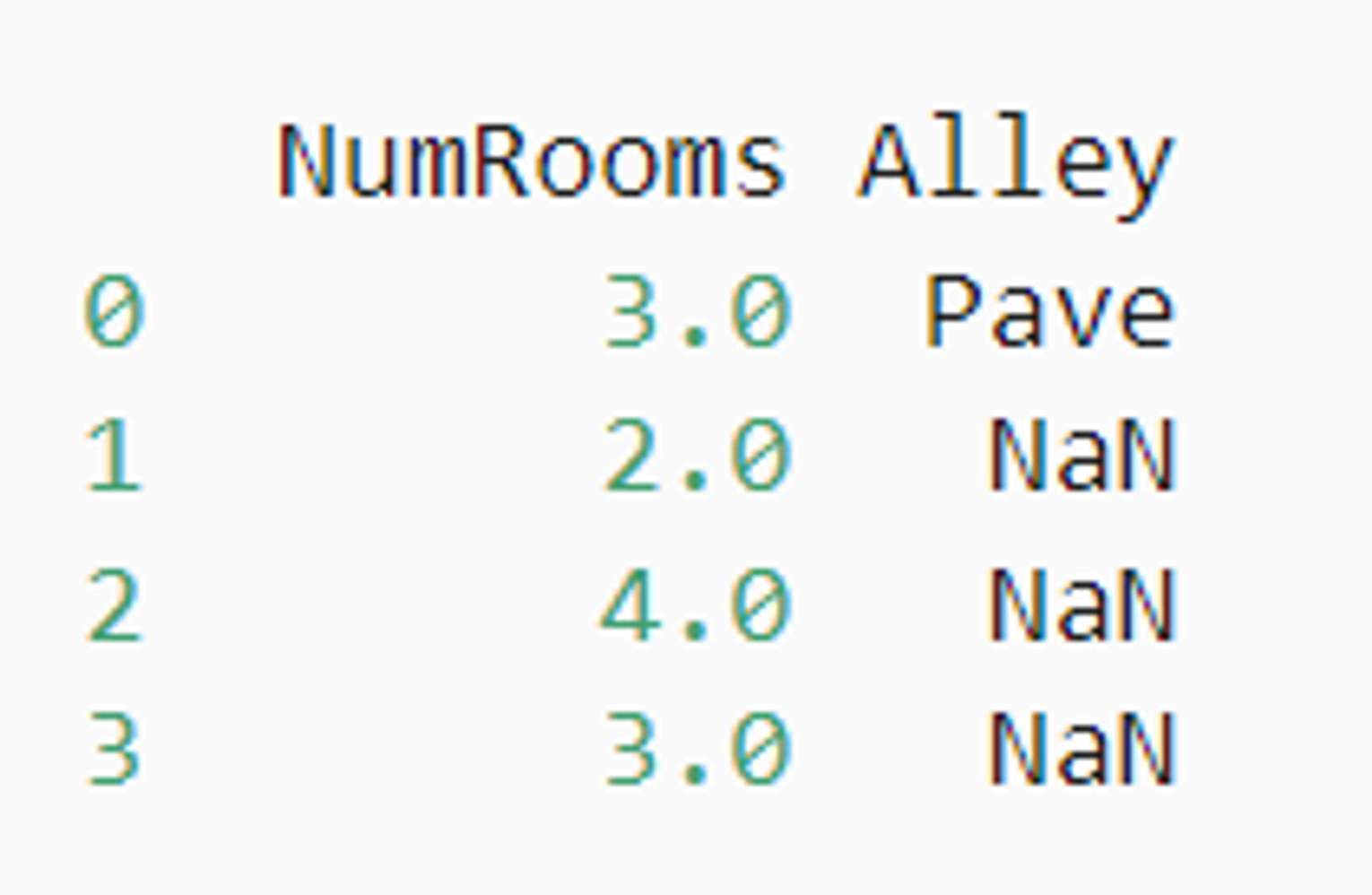
inputs, outputs = data.iloc[:, 0:2], data.iloc[:, 2]
# 对于inputs中缺少的数值,我们用同一列的均值替换“NaN”项。
inputs = inputs.fillna(inputs.mean())
print(inputs)
输出如下:
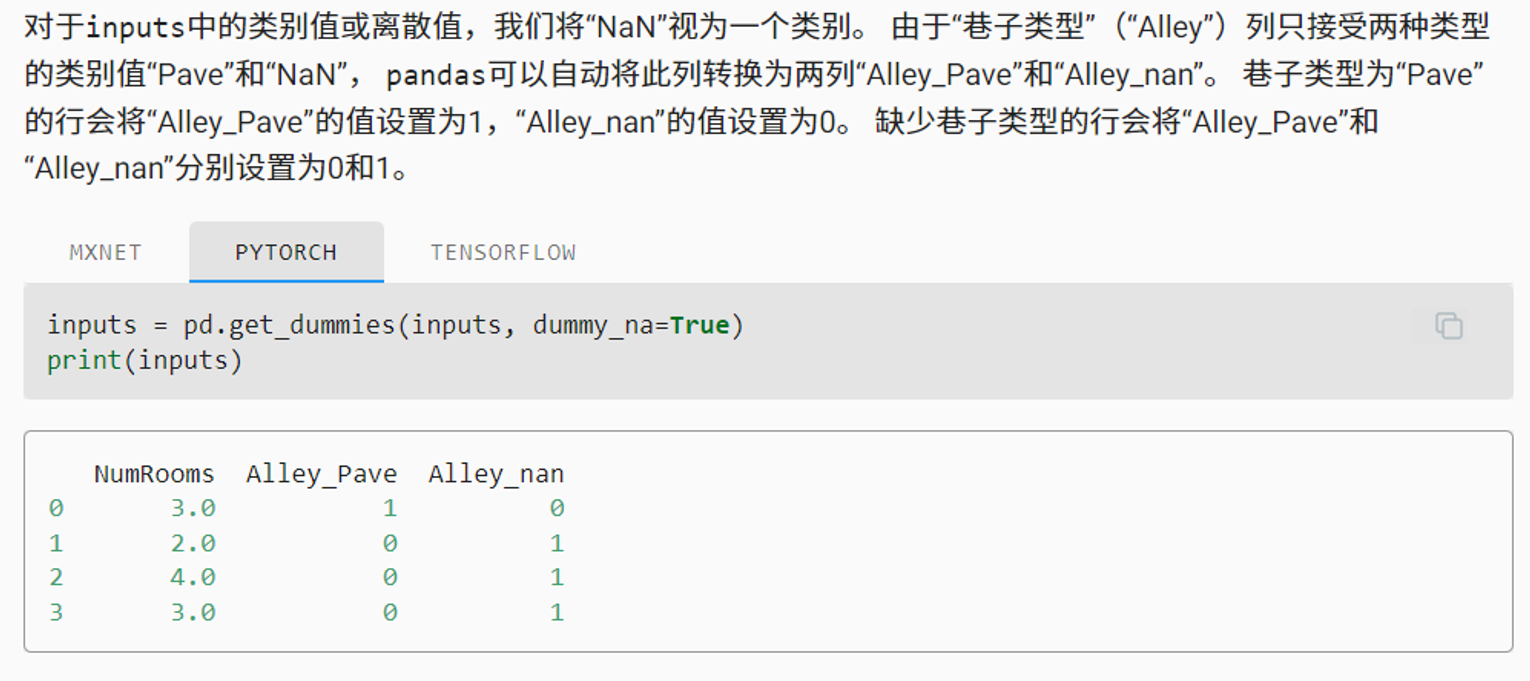
# inputs中的类别值或离散值的缺失值处理
inputs = pd.get_dummies(inputs, dummy_na=True)
print(inputs)
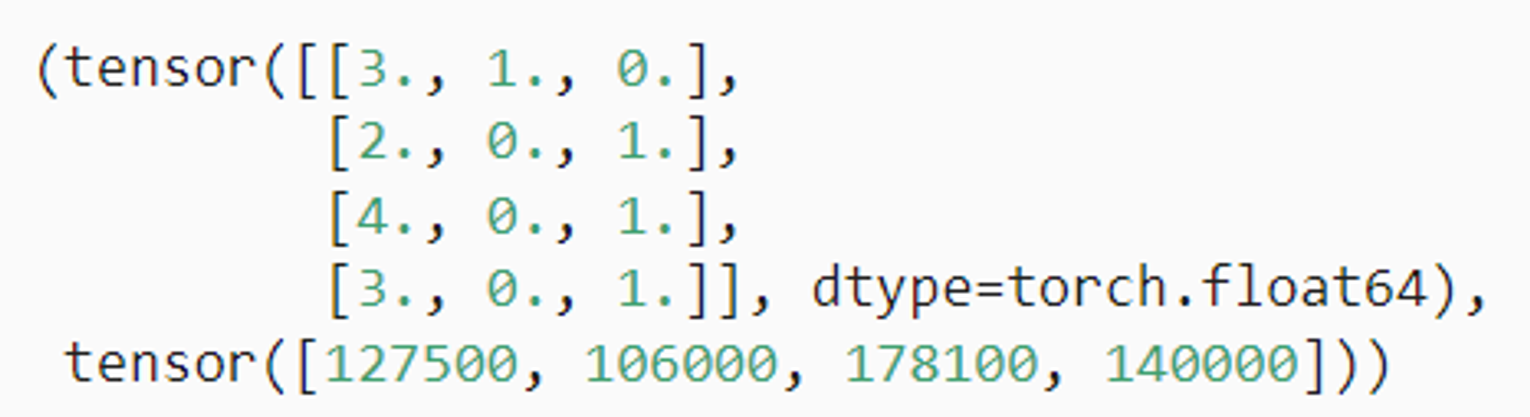
1.3.3. 转换为张量格式
import torch
x, y = torch.tensor(inputs.values), torch.tensor(outputs.values)
x, y
输出如下:
2. 定义网络模型
PyTorch提供了torch.nn库,它是用于构建神经网络的工具库。 nn.Module包含了神经网络的层以及返回输出的forward(input)方法。
import torch
import torch.nn as nn
import torch.nn.functional as F
# 定义一个Net类,继承父类nn.Module
class Net(nn.Module):
# 在`__init__`方法中定义网络的结构(网络的层)
def __init__(self):
super(Net, self).__init__()
# 输入图像channel:1,输出channel:6,5x5卷积核
self.conv1 = nn.Conv2d(1, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
# 全连接层
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
# 在`forward`方法中定义数据的流向(网络的前向传播过程)
def forward(self, x):
# 使用2x2窗口进行最大池化
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))
# 如果窗口是方的,只需要指定一个维度
x = F.max_pool2d(F.relu(self.conv2(x)), 2)
x = x.view(-1, self.num_flat_features(x))
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
def num_flat_features(self, x):
size = x.size()[1:] # 获取除了batch维度之外的其他维度
num_features = 1
for s in size:
num_features *= s
return num_features
net = Net()
print(net)
输出结果为:
Net(
(conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(fc1): Linear(in_features=400, out_features=120, bias=True)
(fc2): Linear(in_features=120, out_features=84, bias=True)
(fc3): Linear(in_features=84, out_features=10, bias=True)
)
这里需要注意:
- backward函数(用于计算梯度)会被autograd自动创建和实现。你只需要在nn.Module的子类中定义forward函数。
- 在创建好神经网络后,我们可以使用net.parameters()方法来返回网络的可学习参数。
3. 定义损失函数和优化器
损失函数用于衡量模型的预测与真实标签的差距。我们一般使用交叉熵损失函数(Cross Entropy Loss)
优化器用于优化模型的参数以减少损失,我们一般使用随机梯度下降优化器(Stochastic Gradient Descent,SGD)
更新网络的梯度,一个简单的更新规则是 weight = weight - learning_rate * gradient
import torch.optim as optim
# 定义损失函数
criterion = nn.CrossEntropyLoss()
# 定义优化器
# 我们需要将网络的参数传递给优化器,然后设置学习率和动量
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
4. 训练网络
在训练过程中,我们首先通过网络进行前向传播得到输出,然后计算输出与真实标签的损失,接着通过后向传播计算梯度,最后使用优化器更新模型参数
在训练集上训练epochs轮次
每一轮,对于一batchs批次
- 获取输入数据:inputs, labels = data
- 梯度清零:optimizer.zero_grad()
- 前向传播:outputs = net(inputs)
- 计算损失:loss = criterion(outputs, labels)
- 反向传播:loss.backward()
- 更新参数:optimizer.step()
5. 测试网络
训练完成后,在测试集上测试网络的性能,评估其泛化能力
with torch.no_grad(): # 是指无需计算梯度,减少内存消耗
6. 保存和加载模型
在深度学习模型的训练过程中,我们经常需要保存模型的参数以便于将来重新加载。这对于中断的训练过程的恢复,或者用于模型的分享和部署都是非常有用的。
PyTorch提供了简单的API来保存和加载模型。最常见的方法是使用torch.save来保存模型的参数,然后通过torch.load来加载模型的参数。
6.1. 保存和加载模型参数
# 保存
torch.save(model.state_dict(), PATH)
# 加载
model = TheModelClass(*args, **kwargs) # 创建新的模型实例
model.load_state_dict(torch.load(PATH)) # 加载模型参数
model.eval()
在保存模型参数时,我们通常使用.state_dict()方法来获取模型的参数。.state_dict()是一个从参数名字映射到参数值的字典对象。
在加载模型参数时,我们首先需要实例化一个和原模型结构相同的模型,然后使用.load_state_dict()方法加载参数。
请注意,load_state_dict()函数接受一个字典对象,而不是保存对象的路径。这意味着在你传入load_state_dict()函数之前,你必须反序列化你的保存的state_dict。
在加载模型后,我们通常调用.eval()方法将dropout和batch normalization层设置为评估模式。否则,它们会在评估模式下保持训练模式。
6.2. 保存和加载整个模型
除了保存模型的参数,我们也可以保存整个模型。
# 保存
torch.save(model, PATH)
# 加载
model = torch.load(PATH)
model.eval()
保存整个模型会将模型的结构和参数一起保存。这意味着在加载模型时,我们不再需要手动创建模型实例。但是,这种方式需要更多的磁盘空间,并且可能在某些情况下导致代码的混乱,所以并不总是推荐的。
7. GPU加速
在深度学习训练中,GPU加速是非常重要的一部分。GPU的并行计算能力使得其比CPU在大规模矩阵运算上更具优势。PyTorch提供了简单易用的API,让我们可以很容易地在CPU和GPU之间切换计算。但需要注意的是,数据在CPU和GPU之间的传输会消耗一定的时间,因此我们应该尽量减少数据的传输次数。
PyTorch支持使用GPU进行计算,这可以大大提高训练和推理的速度。使用GPU进行计算的核心就是将Tensor和模型转移到GPU上。
检查系统中是否存在可用的GPU:
import torch
# 检查是否有可用的GPU
if torch.cuda.is_available():
print("There is a GPU available.")
else:
print("There is no GPU available.")
使用.to(device)方法将tensor移动到GPU上:
# 判断是否支持CUDA
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 创建一个tensor
x = torch.tensor([1.0, 2.0])
# 移动tensor到GPU上
if torch.cuda.is_available():
x = x.to(device)
创建tensor时指定设备:
# 直接在GPU上创建tensor
if torch.cuda.is_available():
x = torch.tensor([1.0, 2.0], device='cuda')
模型训练时,将模型和数据移动到GPU上:
当模型在GPU上时,我们需要确保输入的Tensor也在GPU上,否则会报错。
注意,将模型转移到GPU上后,模型的所有参数和缓冲区都会转移到GPU上。
# 判断是否支持CUDA
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 创建一个简单的模型
model = torch.nn.Linear(10, 1)
# 创建一些数据
data = torch.randn(100, 10)
# 移动模型和数据到GPU
if torch.cuda.is_available():
model = model.to(device)
data = data.to(device)
8. 使用TensorBoard进行可视化
TensorBoard 是一个可视化工具,它可以帮助我们更好地理解,优化,和调试深度学习模型。PyTorch 提供了对 TensorBoard 的支持,我们可以非常方便地使用 TensorBoard 来监控模型的训练过程,比较不同模型的性能,可视化模型结构,等等。
通过使用 TensorBoard,我们可以更好地理解和优化我们的模型。
8.1. 启动TensorBoard
要启动 TensorBoard,我们需要在命令行中运行 tensorboard --logdir=runs 命令,其中 runs 是保存 TensorBoard 数据的目录。
8.2. 记录数据
我们可以使用 torch.utils.tensorboard 模块来记录数据。首先,我们需要创建一个 SummaryWriter 对象,然后通过这个对象的方法来记录数据。
from torch.utils.tensorboard import SummaryWriter
# 创建一个 SummaryWriter 对象
writer = SummaryWriter('runs/experiment1')
# 使用 writer 来记录数据
for n_iter in range(100):
writer.add_scalar('Loss/train', np.random.random(), n_iter)
writer.add_scalar('Loss/test', np.random.random(), n_iter)
writer.add_scalar('Accuracy/train', np.random.random(), n_iter)
writer.add_scalar('Accuracy/test', np.random.random(), n_iter)
# 关闭 writer
writer.close()
8.3. 可视化模型结构
# 添加模型
writer.add_graph(model, images)
8.4. 可视化高维数据
我们还可以使用 TensorBoard 的嵌入功能来可视化高维数据,如图像特征、词嵌入等。
# 添加嵌入
writer.add_embedding(features, metadata=class_labels, label_img=images)